思想 #
二分查找的思想是,在有序序列中寻找目标值(目标的定义每题不同),通过比较中间元素,每次将空间缩小一半。是“分治法(Divide and Conquer)”最纯粹的例子之一
每次比较排除一半元素:
$$ T(n)=T(\frac{n}{2})+O(1),解得 T(n) = O(\log_2{n}) $$虽然思想很简单,但是实现时需要考虑很多细节,不然可能会产生错误
“Although the basic idea of binary search is comparatively straightforward, the details can be surprisingly tricky…” — Donald Knuth.
常见错误 #
以下代码展示了一个看起来“没问题”的 Pascal 版二分查找,但实际上包含多个错误。
这段 Pascal 代码摘自 Richard E. Pattis 于 1988 年发表的论文《Textbook Errors in Binary Searching》。 他查阅了二十本教材,发现它们中普遍使用了这样的二分查找实现。(在 Pascal 语言中,数组的下标从 1 开始。)
PROCEDURE BinarySearch (A : anArray,
Size : anArraySize,
Key : INTEGER,
VAR Found : BOOLEAN;
VAR Index : anArrayIndex);
Var Low, High : anArrayIndex;
BEGIN
LOW := 1;
High := Size;
REPEAT
Index := (Low + High) DIV 2;
If Key < A[Index]
THEN High := Index - 1
ELSE Low := Index + 1
UNTIL (Low > High) OR (Key = A[Index]);
FOUND := (Low <= High)
END;
错误 1 没有在 O(log n) 时间复杂度下运行 #
问题不在循环逻辑本身,而在函数参数传递方式。
代码中的 A : anArray 是按值传参的。在 Pascal(或 C++)中,如果你把整个数组以值传递给函数(不是以引用/指针),编译器会复制整个数组到函数的栈或临时内存。
数组复制操作的时间复杂度是 O(n),二分查找本身的逻辑是 O(log n),于是总体复杂度变成 O(n),失去了“对数查找”的意义。有些程序员甚至写递归版二分查找,每次递归调用都再次复制整个数组,这种情况下时间复杂度更糟糕。
错误 2 size = 0 #
如果 Low = 1、High = 0,再去访问 A[(Low + High) DIV 2] 就会越界,所以须在实现中加上 if Size = 0 then exit; 或类似的边界检查
错误 3 size = 1 #
如果最后一次迭代开始时Low = High (例如数组大小为 1 时),则进入到ELSE分支 Low := Index + 1,Low = 2 > High = 1 退出循环,即使 Key 实际上存在于数组中,程序也会将 Found := (Low <= High) 设为 False,导致找不到目标值
错误 4 目标值小于最小元素 #
当 Index 取值为 1 时,代码会将 High 设为 0,从而导致数组下标越界等错误。(上面的代码 UNTIL (Low > High) OR (Key = A[Index]) 立刻为真(1 > 0),于是本轮结束后直接退出,不会出现此错误,但是其他版本可能会出现)
错误 5 目标值大于最大元素 #
当 Index 取值为 Size 时,代码会将 Low 设为 Size + 1,从而导致数组下标越界等错误。(上面的代码 UNTIL (Low > High) OR (Key = A[Index]) 立刻为真(Size+1 > Size),于是本轮结束后直接退出,不会出现此错误,但是其他版本可能会出现)
通用解法 #
题目要求的目标值可能每道题目都不同,通常我们会对模板二分查找代码修改,但是具体怎么修改可能毫无头绪或者错误百出。
这里介绍一种简单、通用的思路,将二分查找的low、high边界赋予特定的含义(红蓝边界),来解决大部分二分查找问题。
参看下面题目:
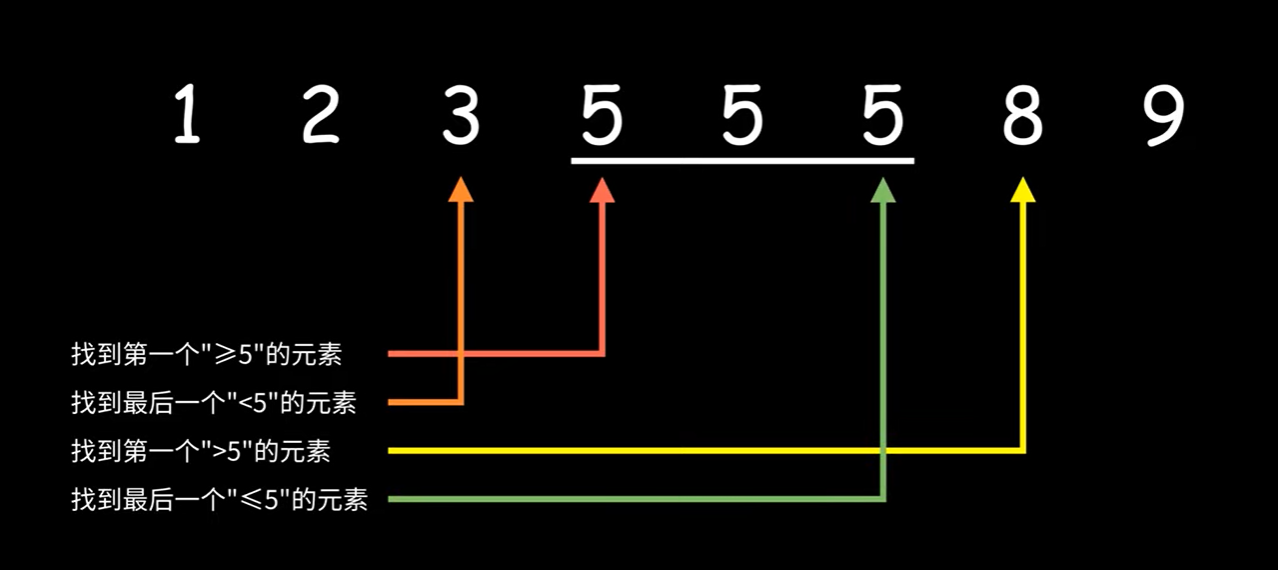
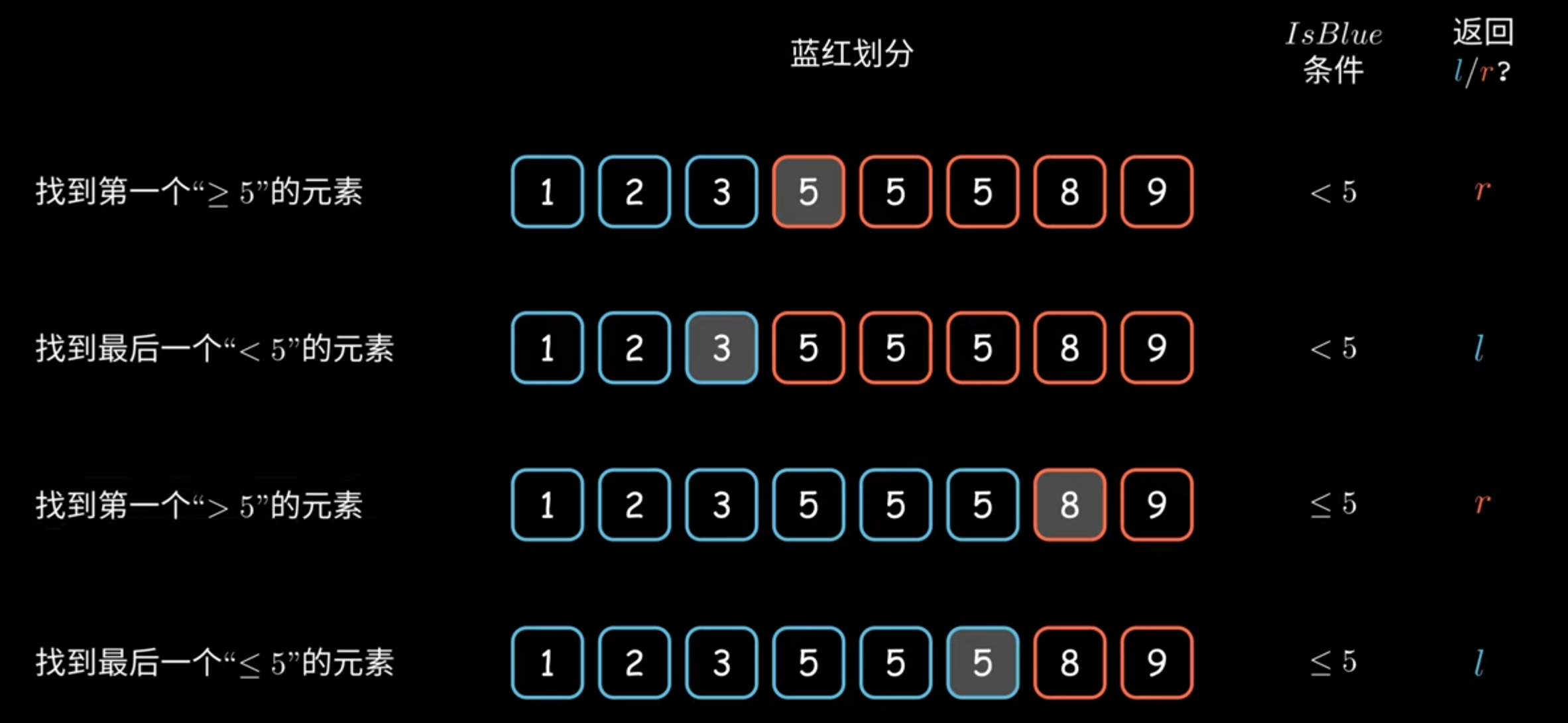
- 找到第一个">=5"的元素
- 找到最后一个"<=5"的元素
- 找到最后一个"<5"的元素
- 找到第一个">5"的元素
这4个问题表面上相似,但细节上却有不同,用二分查找细节处理并不容易。
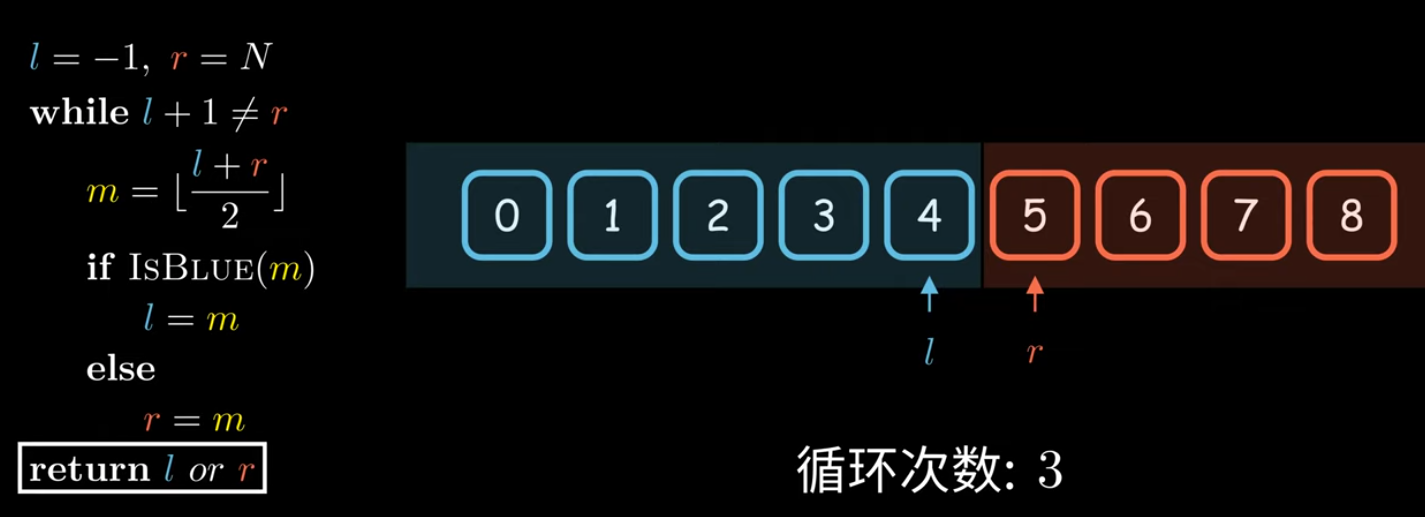
红蓝边界法 #
初始列表可以全部视为灰色,目标将列表分为红蓝两部分区域:

l,r 分别指向红蓝区域边界,根据题目要求赋予红蓝区域特定含义,并不断调整红蓝区域边界:
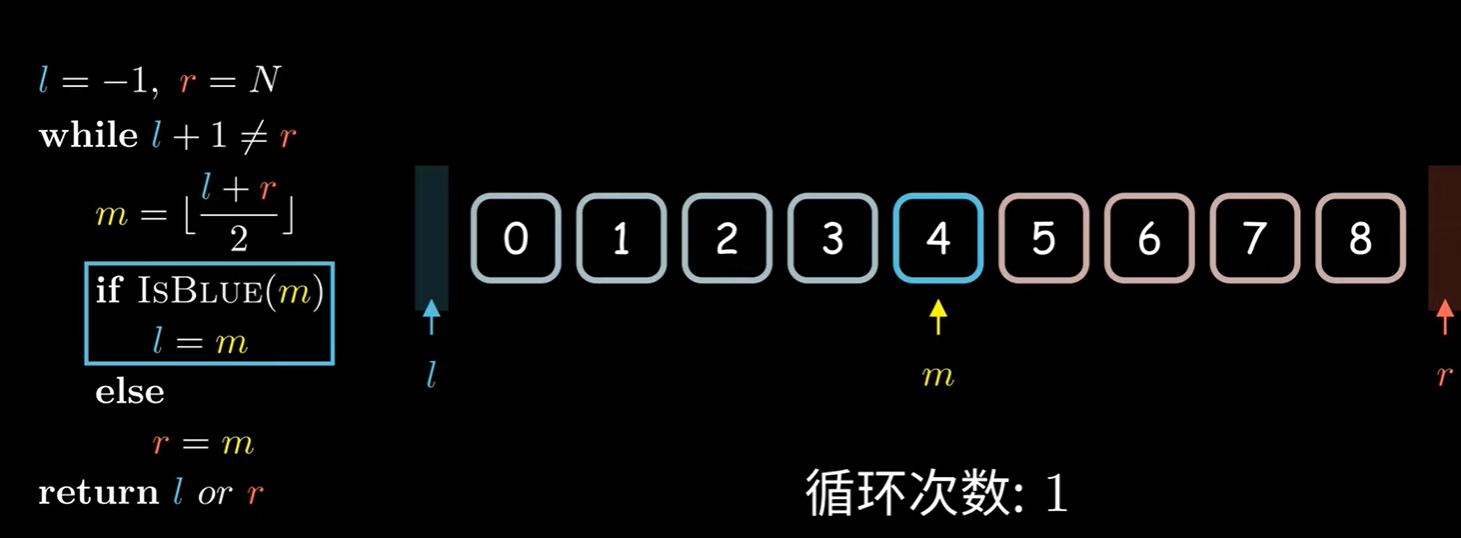
根据题目要求返回 l,r
细节问题 #
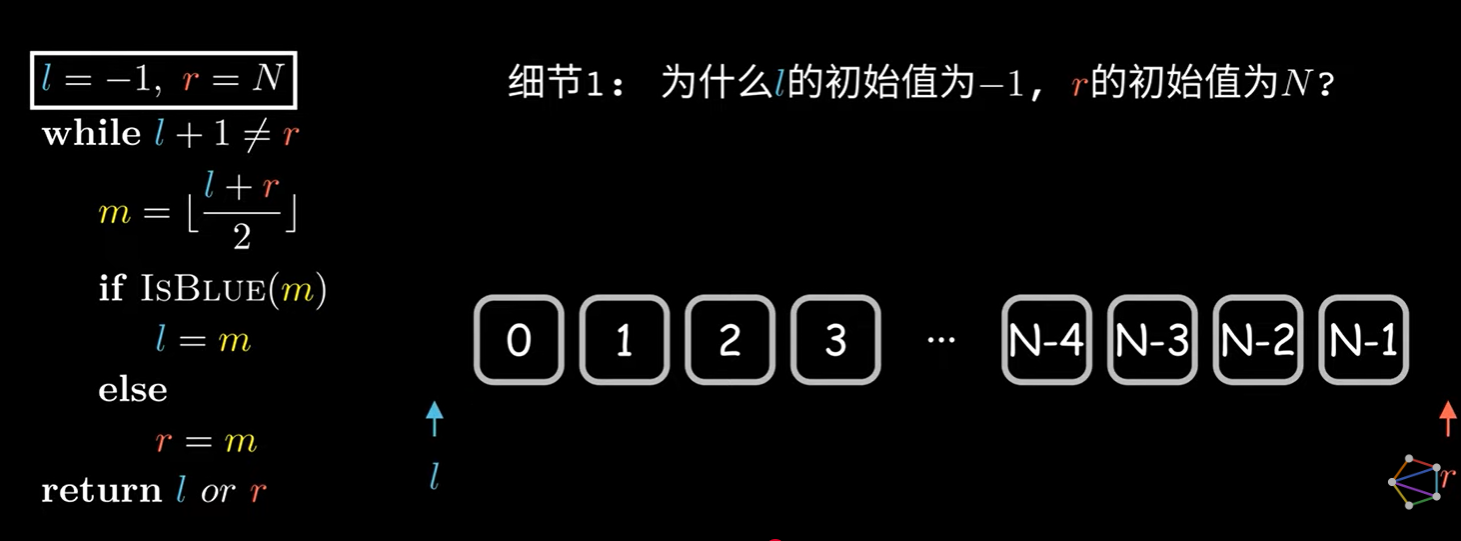
细节1:为什么l的初始值为-1,r的初始值为N?
答:因为整个数组可能最终是全红或者全蓝,违反了我们对l,r的定义,继而引起错误。
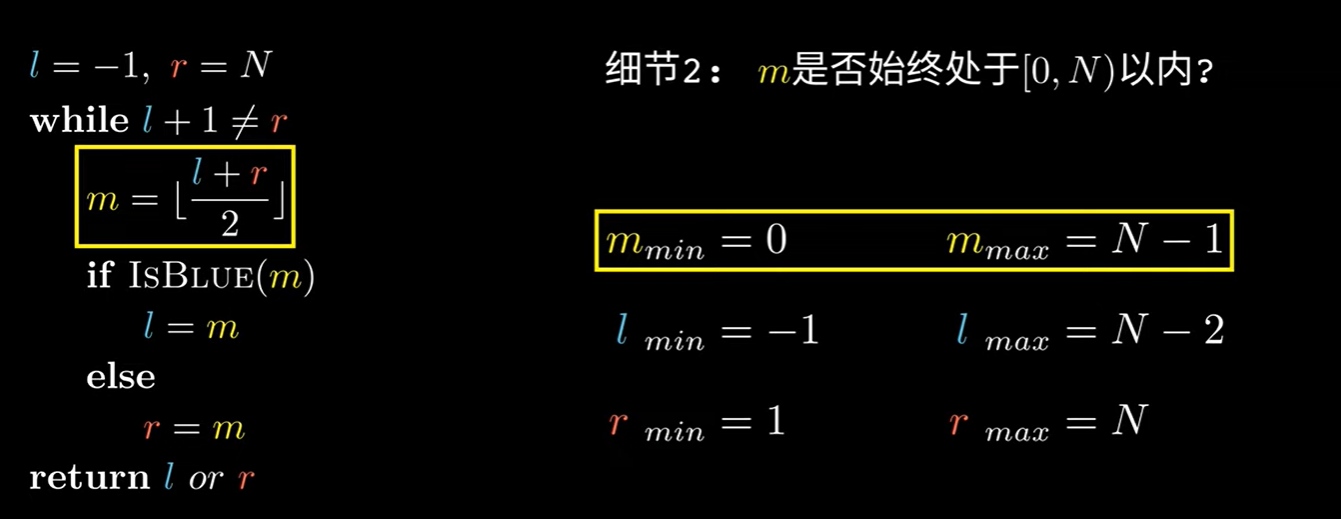
细节2:m是否始终处于[0,N)以内?
答:基于循环条件l+1 ≠ r,可得l,r的最值,进而判断m始终处于[0,N)以内。
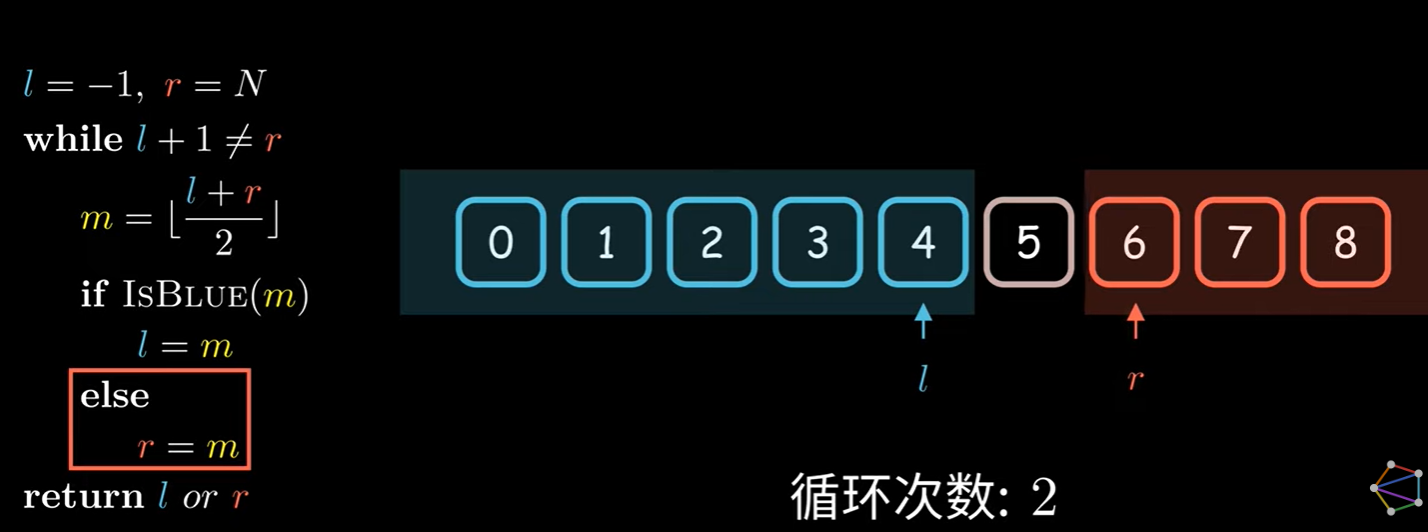
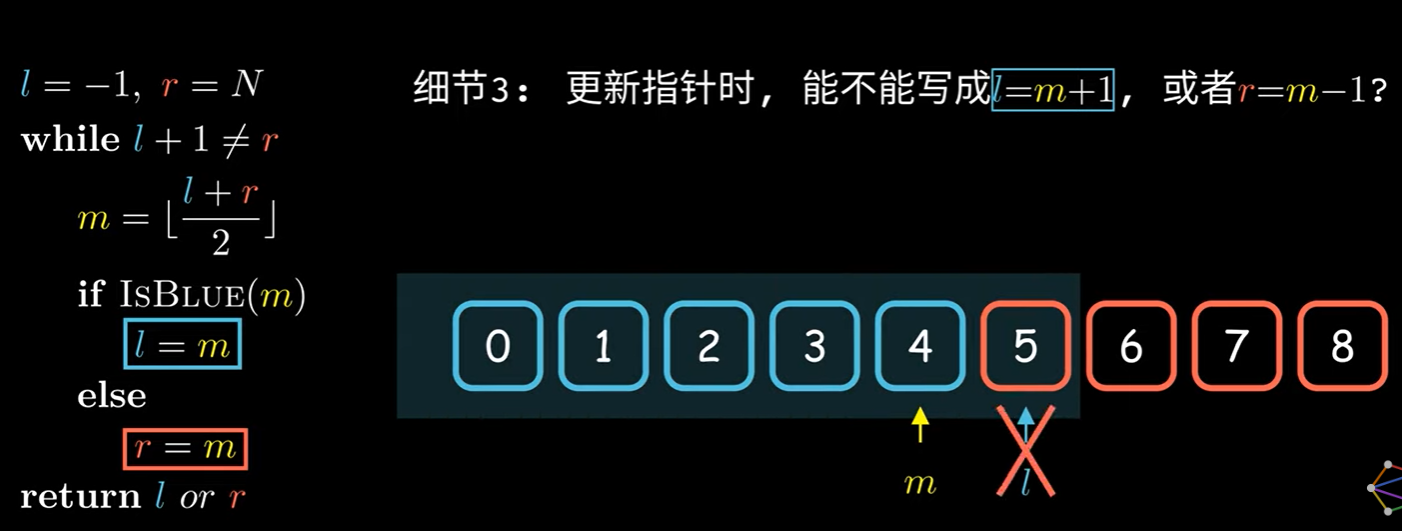
细节3:更新指针时,能不能像常规的二分查找那样,能不能写成 l=m+1,或者 r=m-1?
答:不能。可能会导致l指向红色区域,或者r指向蓝色区域,违反了我们对l,r的定义,继而引起错误。
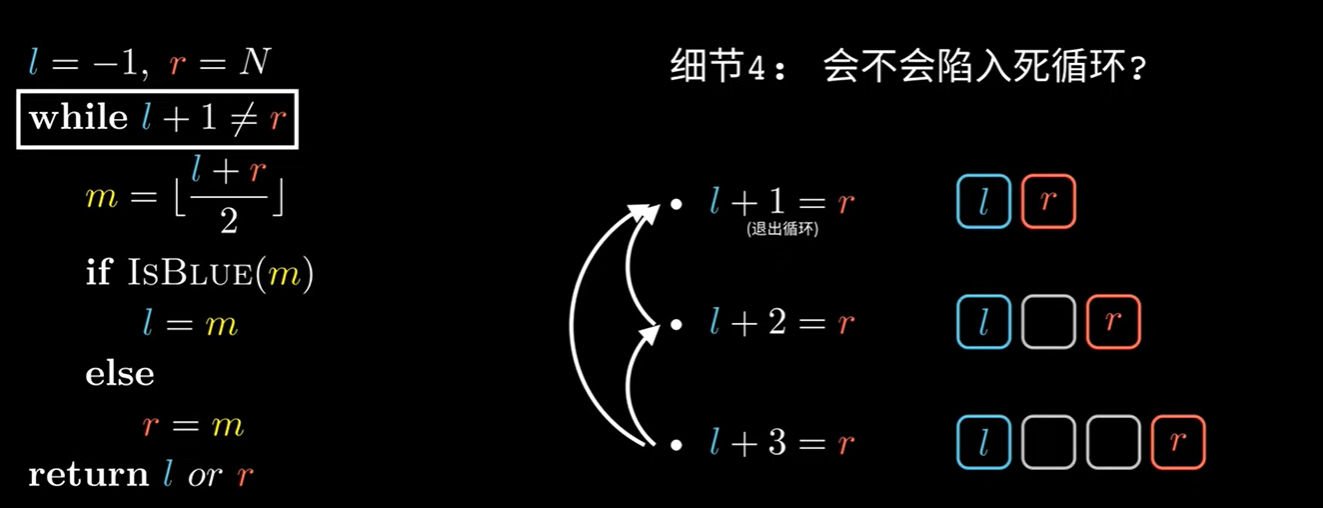
细节4:程序会不会陷入死循环?
答:不会。不论l,r的值为多少,都会回归到l+1=r,这种情况。
答案 #
求平方根 #
这里想通过二分查找求平方根来表达,二分查找的解决对象重要的是满足单调性,而不限于离散型有序数组、整数下表等。
- 确定初始区间:为目标数\(a\)(\(a\ge 0\))设定一个初始的搜索区间。如果\(a\ge 1\),一个合适的区间是\([0,a]\);如果\(0\le a<1\),则区间应为\([0,1]\)。综合起来,一个安全的选择是\([0,\max (1,a)]\)。
- 计算中点:计算当前区间的中间值,\(mid=(low+high)/2\)。
- 检查中点的平方:
- 如果 \(mid^2\) 非常接近\(a\)(在预设的精度范围内),则 \(mid\) 就是我们需要的平方根
- 如果\( mid^{2} \lt a \),说明 \(a\) 的平方根应该在区间\([mid, high]\)内,所以将\(low\)更新为\(mid\)
- 如果\(mid^{2} \gt a\),说明 \(a\) 的平方根应该在区间\([low, mid]\)内,所以将\(high\)更新为\(mid\)
- 重复过程:重复步骤2和3,每次都将搜索区间缩小一半,直到满足预设的精度要求为止
参考 #
https://stackoverflow.com/questions/504335/what-are-the-pitfalls-in-implementing-binary-search
https://www.youtube.com/watch?v=JuDAqNyTG4g