背景 #
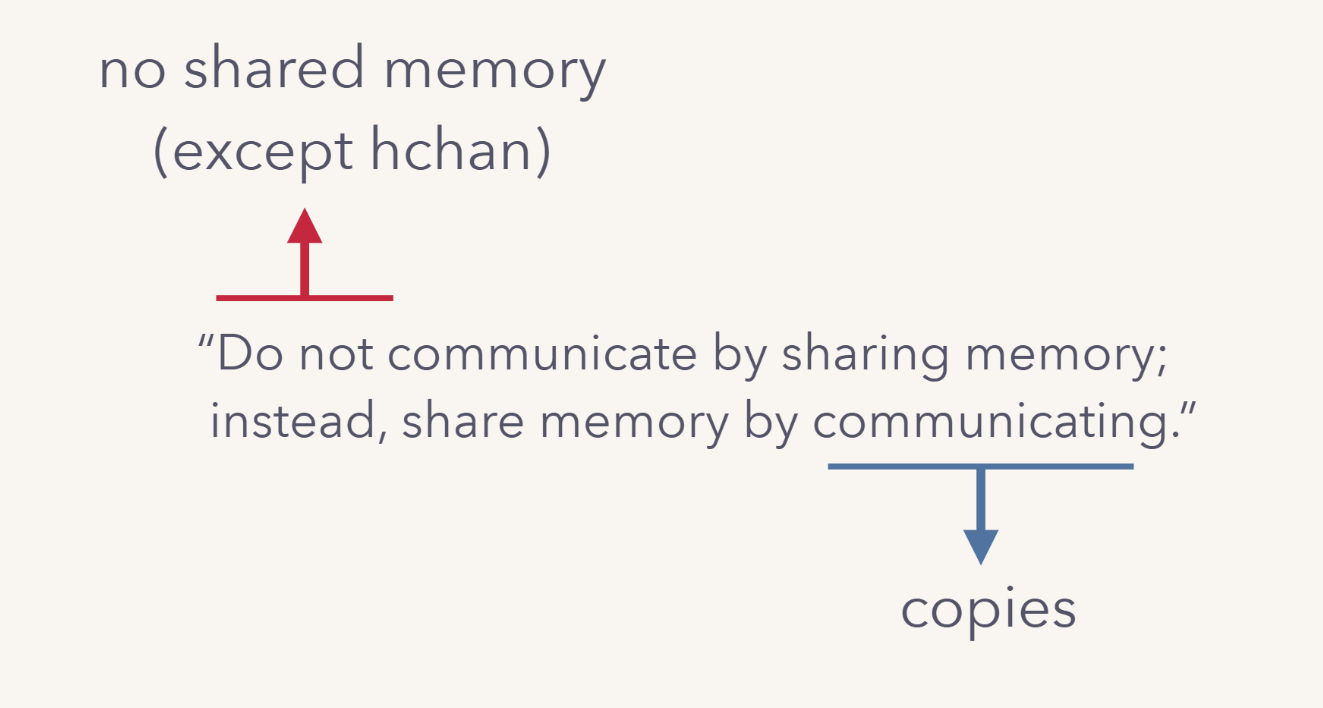
channel 底层其实是一个利用互斥锁(mutex)+ 队列来协调 goroutine 间数据通信的数据结构。符合 不要通过共享内存来通信,而要通过通信来共享内存 的思想。
下面会从 channel 的几个特性展开介绍 channel 的一些原理机制:
channel是goroutine-safe的,goroutine之间可以互相传值,FIFO风格channel可以引起goroutine的block和unblock
hchan & make chan #
在 Go runtime 中 channel 的底层数据结构是 hchan ,代码在
https://github.com/golang/go/blob/master/src/runtime/chan.go#L34
type hchan struct {
qcount uint // total data in the queue
dataqsiz uint // size of the circular queue
buf unsafe.Pointer // points to an array of dataqsiz elements
elemsize uint16
closed uint32
timer *timer // timer feeding this chan
elemtype *_type // element type
sendx uint // send index
recvx uint // receive index
recvq waitq // list of recv waiters
sendq waitq // list of send waiters
bubble *synctestBubble
// lock protects all fields in hchan, as well as several
// fields in sudogs blocked on this channel.
//
// Do not change another G's status while holding this lock
// (in particular, do not ready a G), as this can deadlock
// with stack shrinking.
lock mutex
}
主要字段含义:
| 字段 | 类型 | 含义 |
|---|---|---|
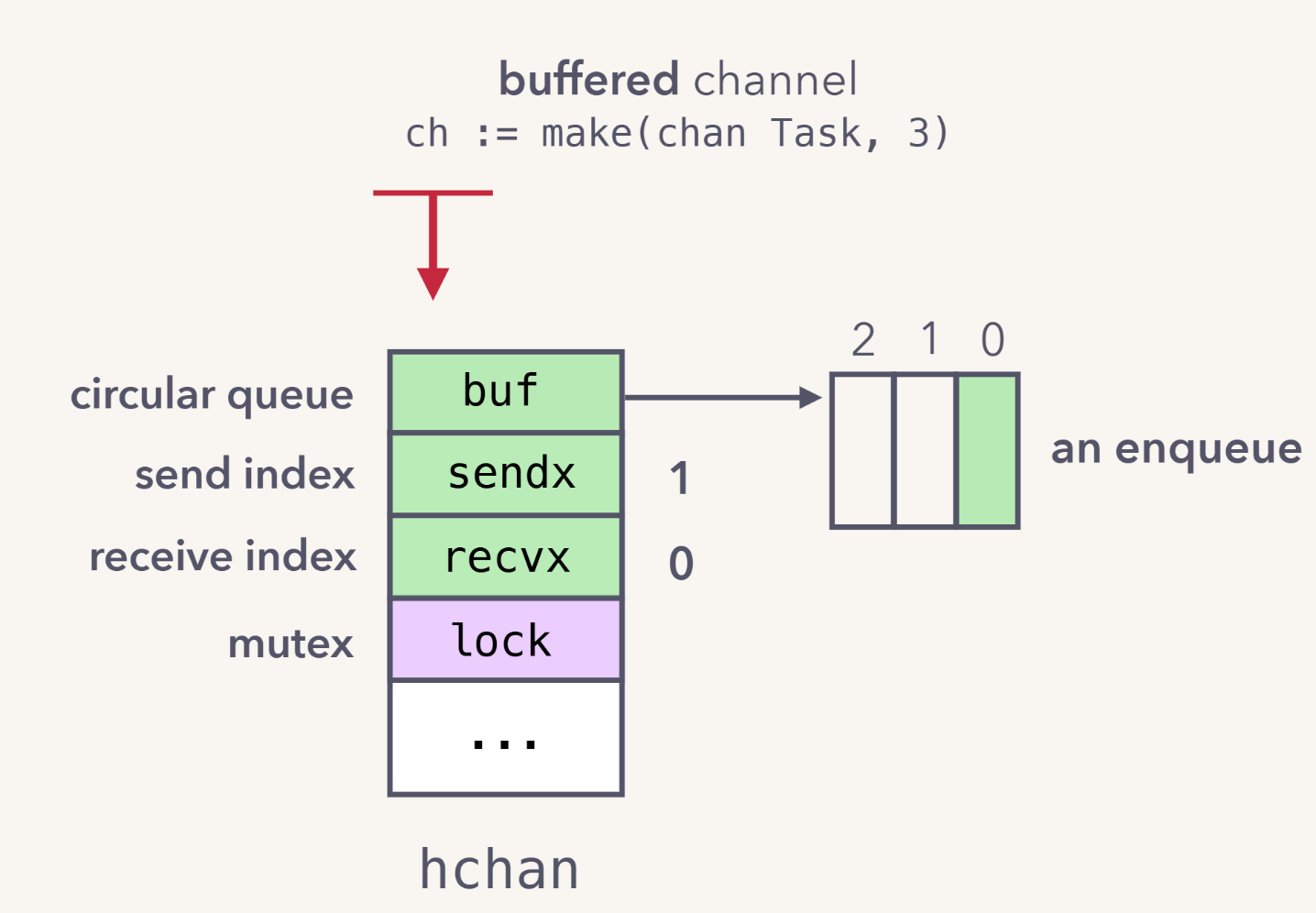
buf | unsafe.Pointer | 指向循环队列数组的指针,仅用于有缓冲 channel |
dataqsiz | uint | 循环队列的容量,即 make(chan T, N) 中的 N |
qcount | uint | 队列中当前存放的元素数量 |
elemsize | uint16 | 每个元素的字节大小 |
elemtype | *_type | 元素的类型信息,用于内存拷贝和 GC |
sendx | uint | 下一次写入的位置 |
recvx | uint | 下一次读取的位置 |
recvq | waitq | channel 空而阻塞的 goroutine 链表(等待接收) |
sendq | waitq | channel 满而阻塞的 goroutine 链表(等待发送) |
closed | uint32 | 0 = 开启,1 = 已关闭;close(ch) 后置 1 |
lock | waitq | 互斥锁,保护上述所有字段的并发访问 |
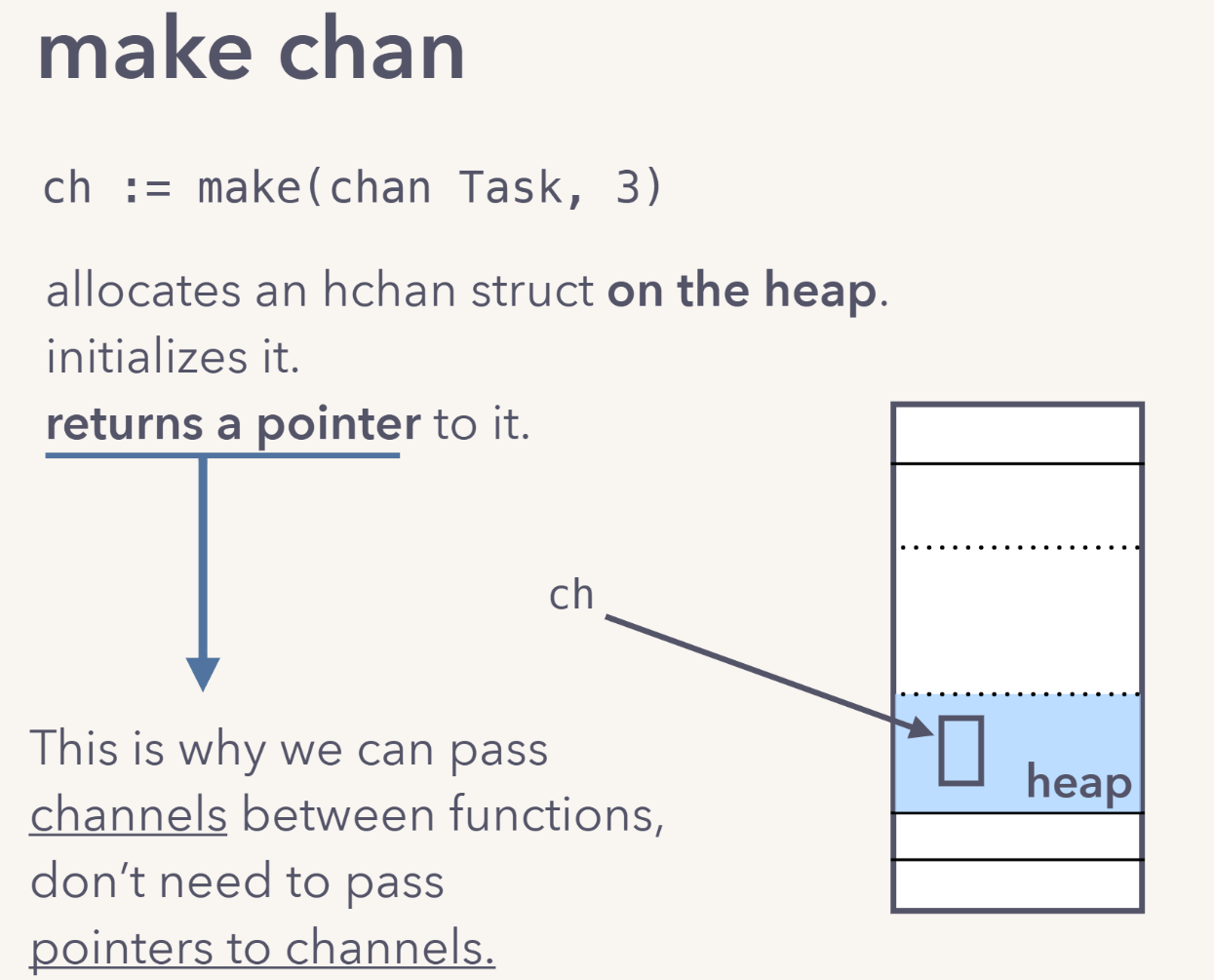
ch := make(chan Task, 3) / ch := make(chan Task) 对应 Go runtime 中的 runtime.makechan ,代码在
https://github.com/golang/go/blob/master/src/runtime/chan.go#L75
func makechan(t *chantype, size int) *hchan {...} 在 heap上分配了一个hchan,同时返回的是 *hchan,所以多个 goroutine 操作同一个 channel 时,实际是在共享同一个 *hchan 指针,指向了同一个hchan,不会复制 hchan 结构体
package main
import "fmt"
func main() {
ch := make(chan int, 1) // ch 本质是 *hchan 指针,指向堆上一块内存
go func() {
ch <- 42 // 闭包捕获
}()
go func(ch chan int) {
v := <-ch // 值传递
fmt.Println(v)
}(ch)
}
send & receive #
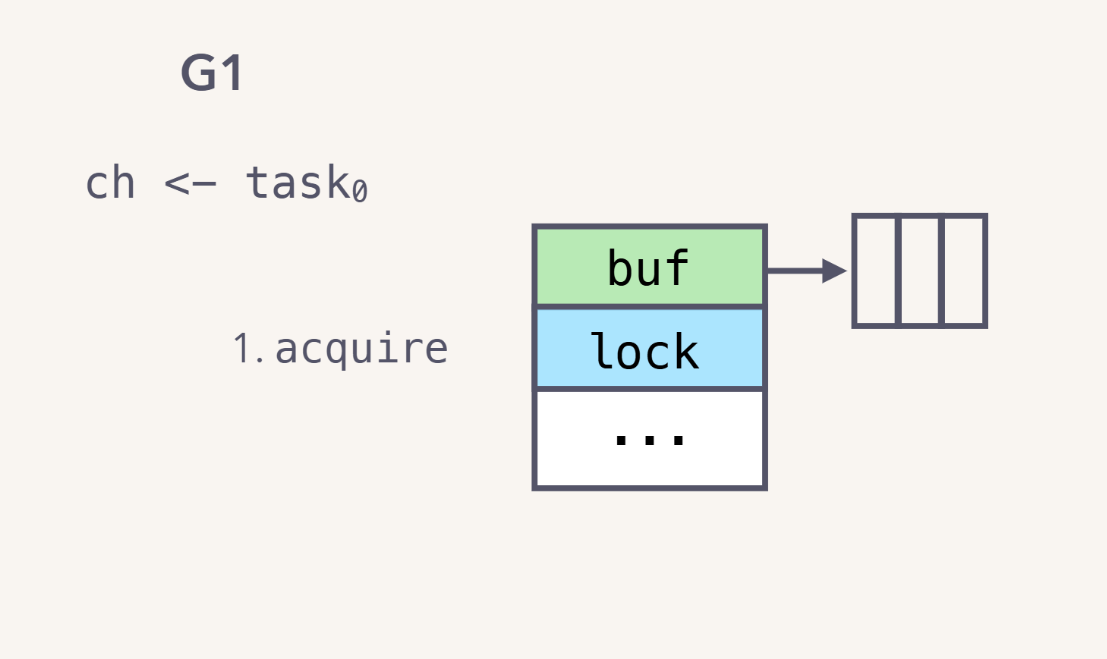
对于 channel,本质是一个加锁的环形队列,所以是 goroutine-safe 的,goroutine 之间可以互相传值,FIFO风格
以下例子(针对有缓冲的 channel),通过 send/receive channel 实现跨 goroutine 的通讯
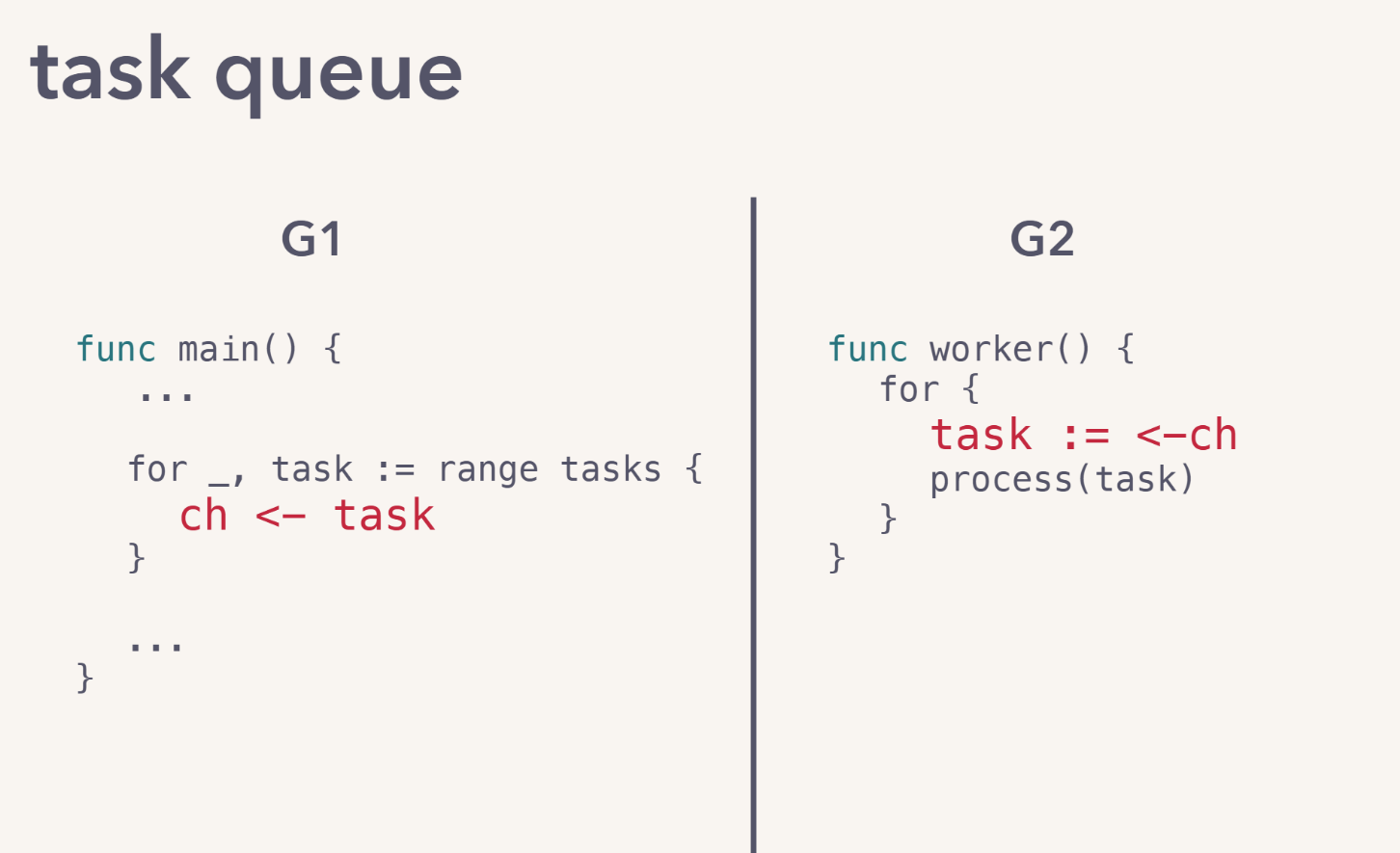
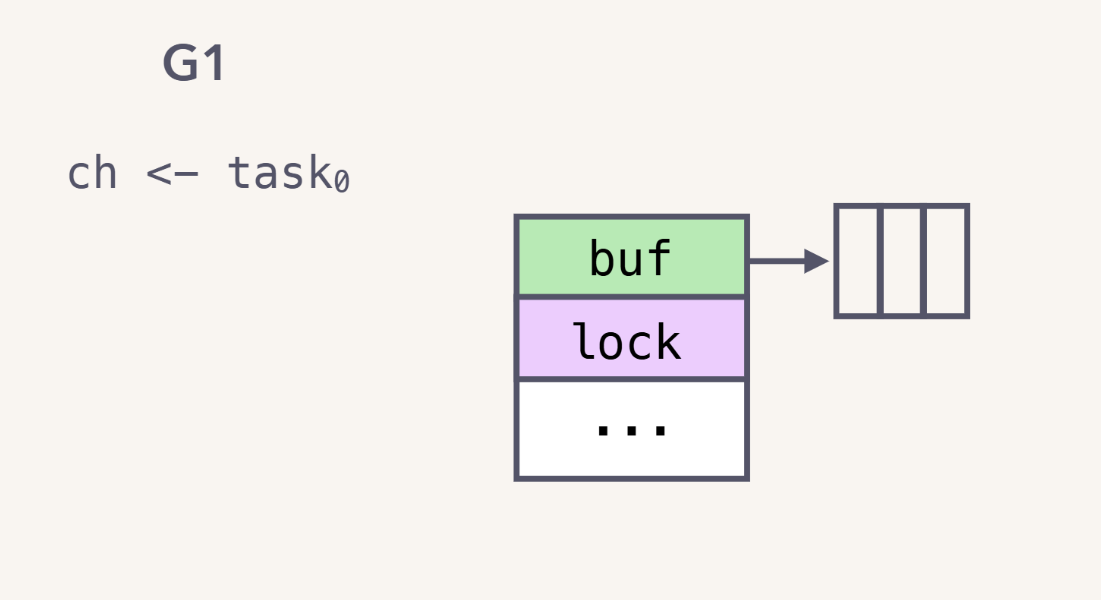
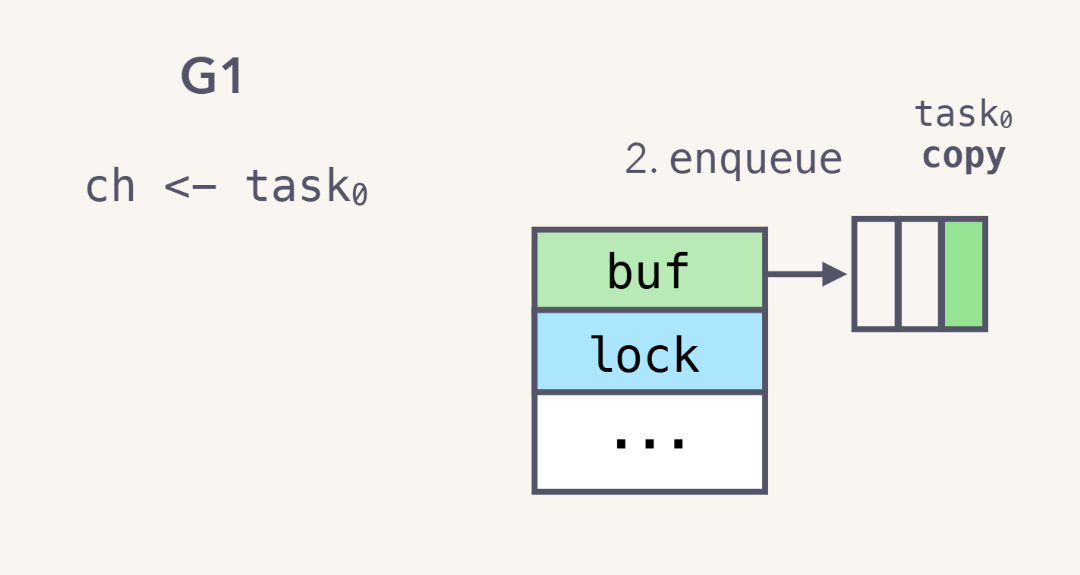
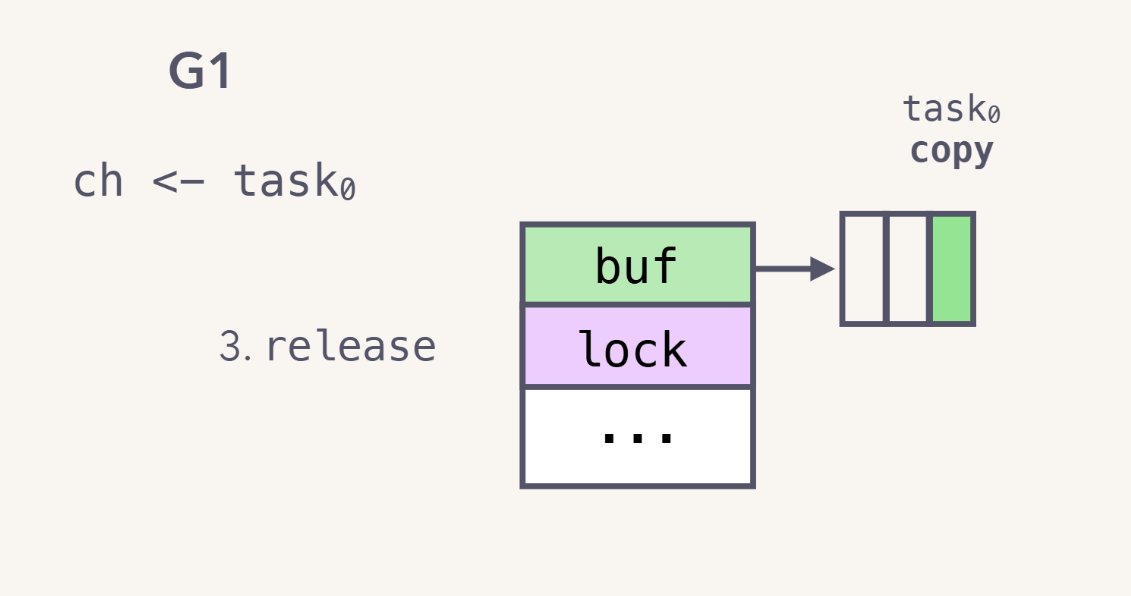
G1 获得锁,入队,task0 是通过内存 copy 到 channel 中的 buf 的,然后释放锁
G2 获得锁,出队,channel 中的 buf 对应元素通过内存 copy 到 task0,然后释放锁
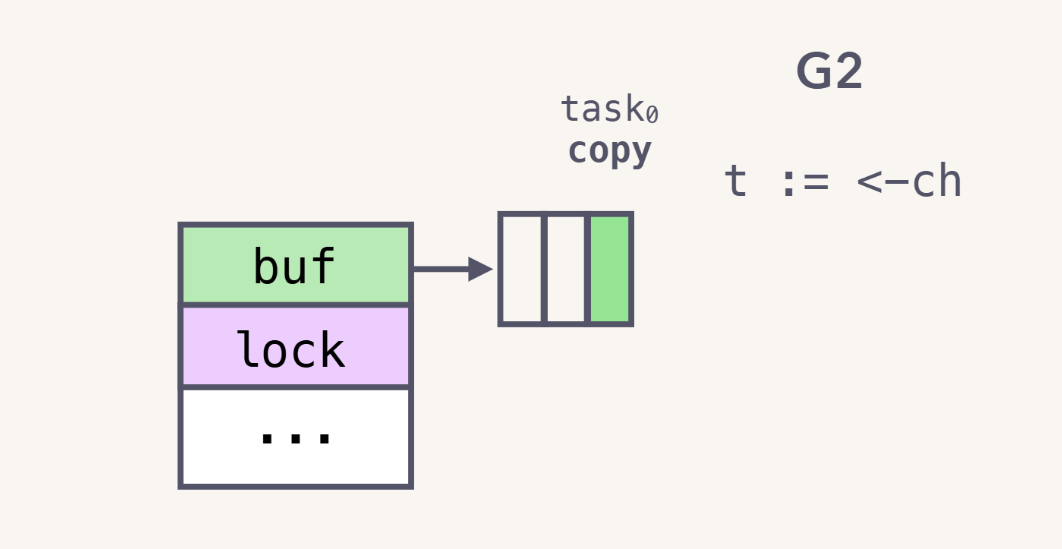
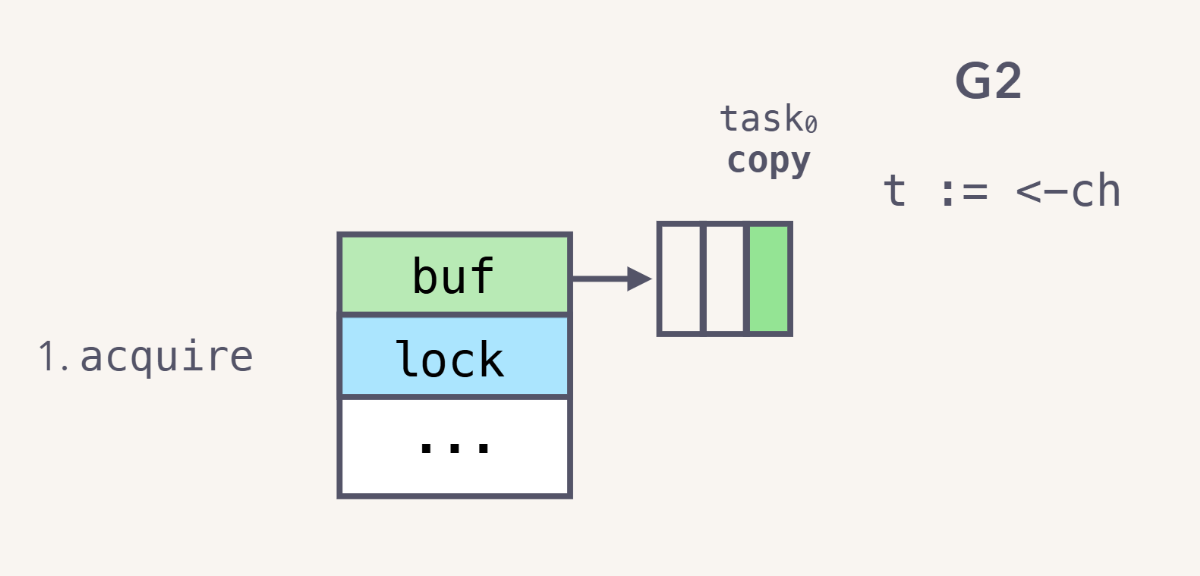
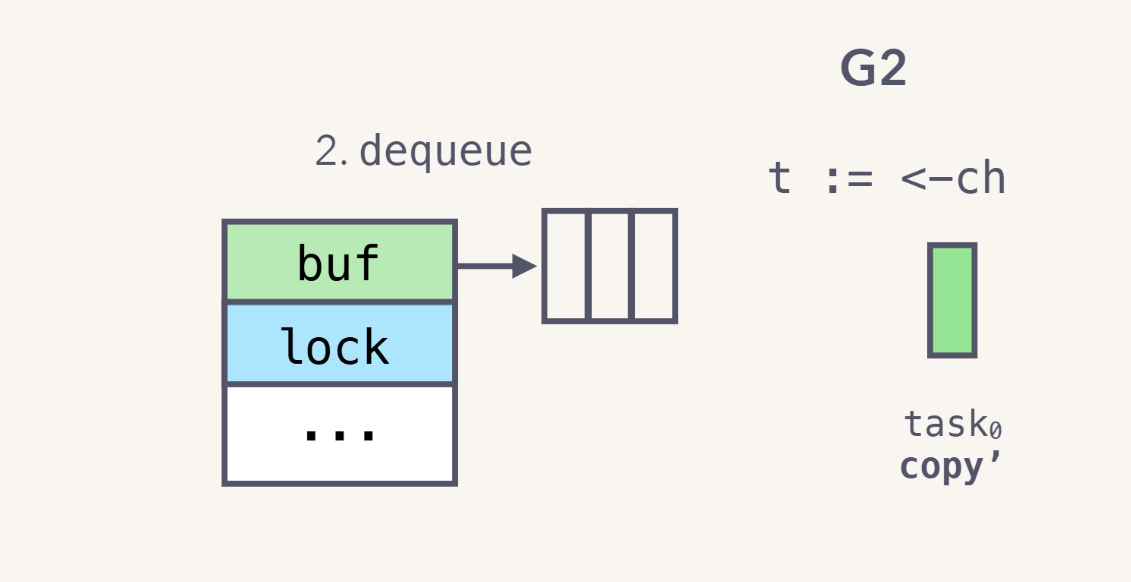
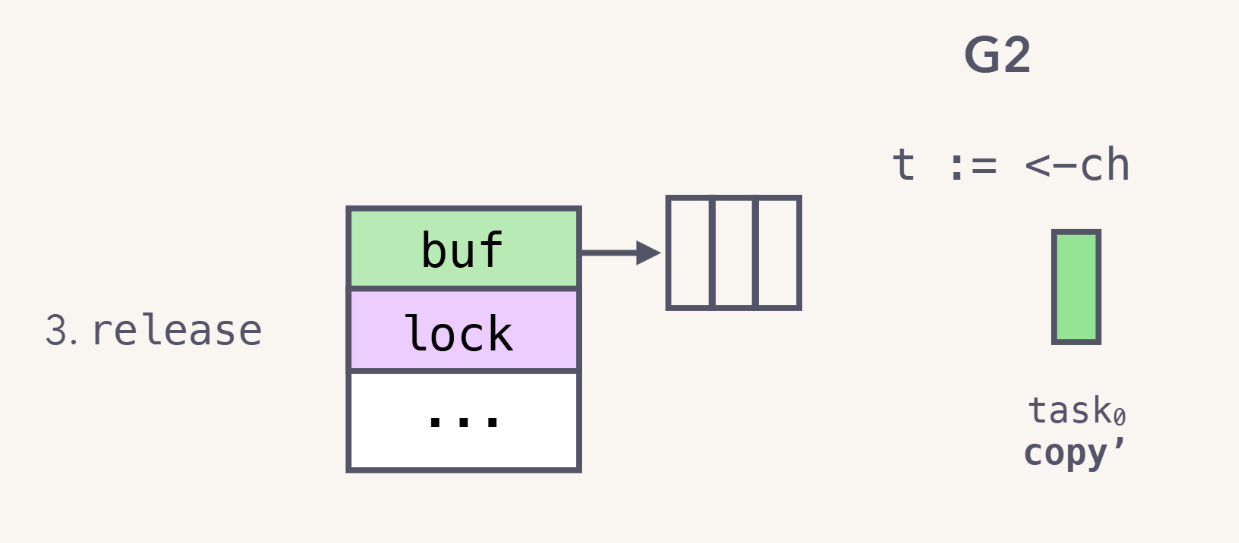
通过这个收发的例子,直观感受到了 不要通过共享内存来通信,而要通过通信来共享内存 的含义
对于无缓冲的
channelbuf 是 nil,dataqsiz = 0,qcount永远为 0。数据传输时,完全绕过 buf,数据直接在goroutine之间传递,如receive first场景G1:
v := <- ch阻塞等待,将 G1 封装成sudog,sudog.elem指向接收变量地址&v,加入到ch.recvq队列中G2:
ch <- v发现ch.recvq队列非空,ch.recvq出队,直接调用typedmemmove把数据拷贝到sudog.elem(即 G1 栈上的v),拷贝完成后再调用goready唤醒 G1(顺序不能反,否则 G1 唤醒后栈可能发生收缩,导致sudog.elem成为野指针)
send first同理,sudog.elem指向发送值地址&x,G2 阻塞;G1 到来后直接从sudog.elem读取数据,再唤醒 G2
block & unblock #
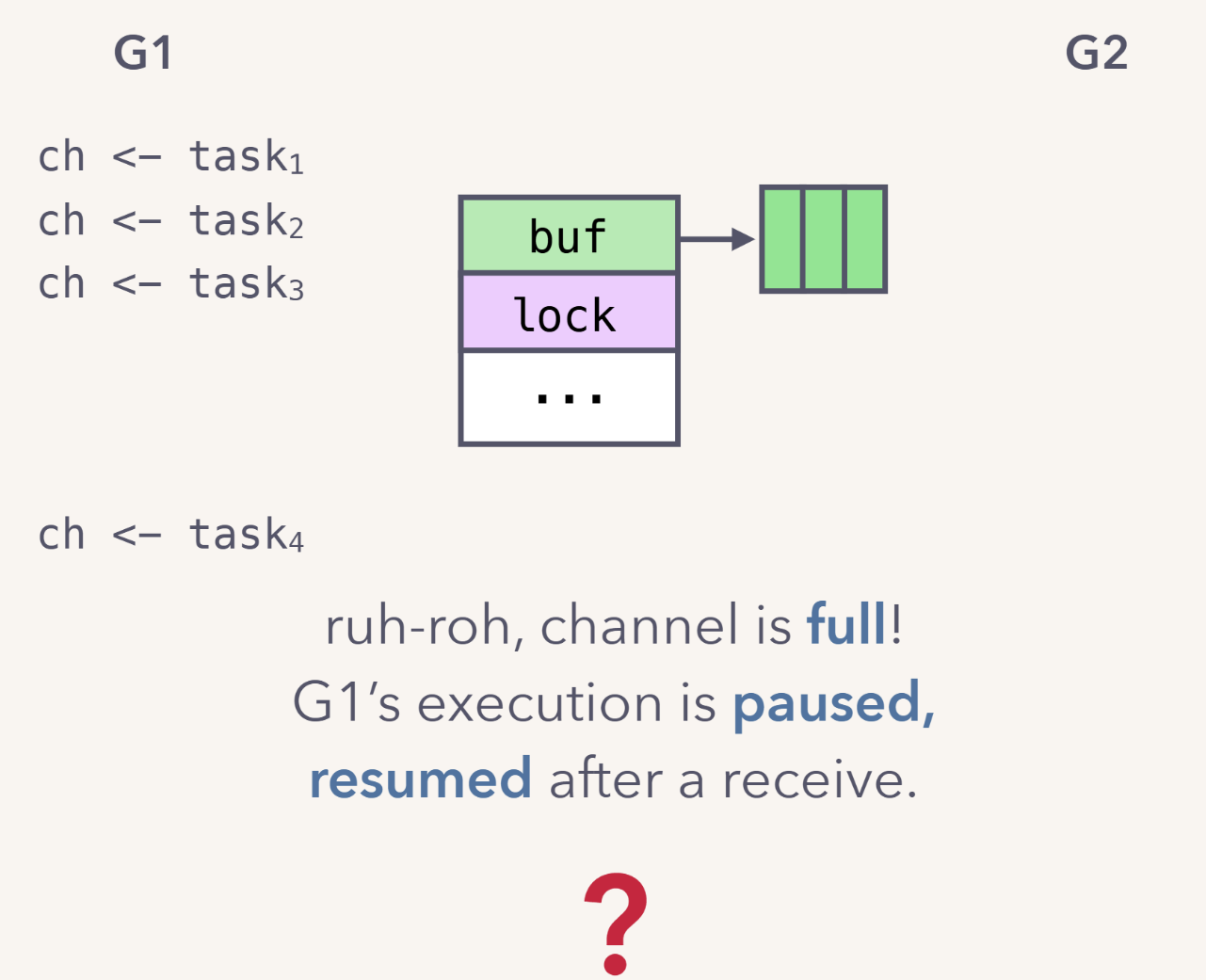
考虑以下 send first的场景, ch <- task4
当 channel 满了,对应 send 的 goroutine 会暂停执行,并在 channel 被 receive 之后恢复执行
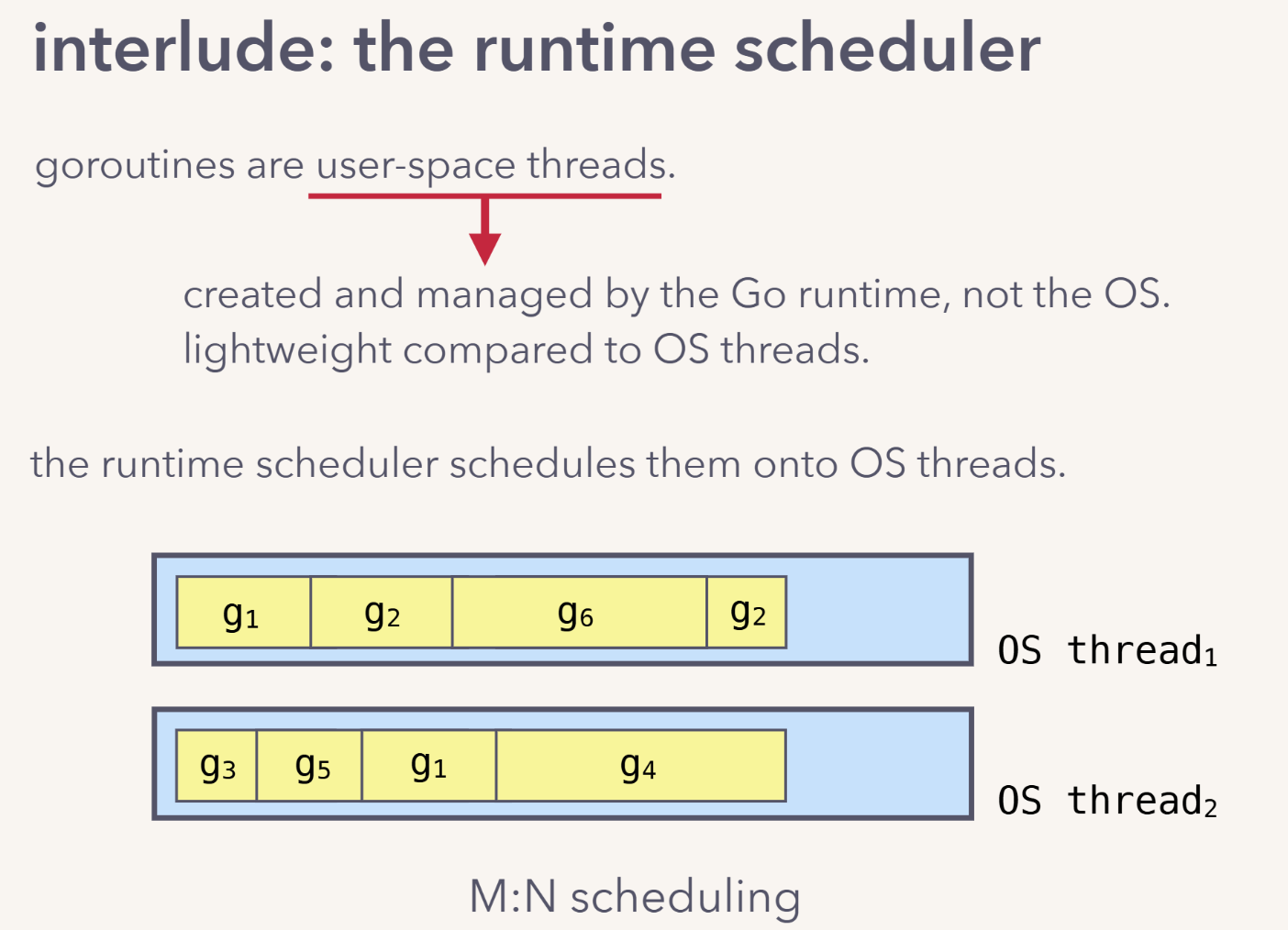
goroutine是用户态线程,由Go runtime创建和管理,比 OS thread 轻量得多。
runtime scheduler负责将M个goroutine调度到N个 OS thread 上执行,即M:N调度。如下图,
g1 g2 g6等多个goroutine分时复用 OSthread1,g3 g5 g4等复用 OSthread2,一个goroutine阻塞让出执行,就会去执行其他goroutine,同一个 goroutine(如 g1)也可以先后跑在不同的 OS thread 上。
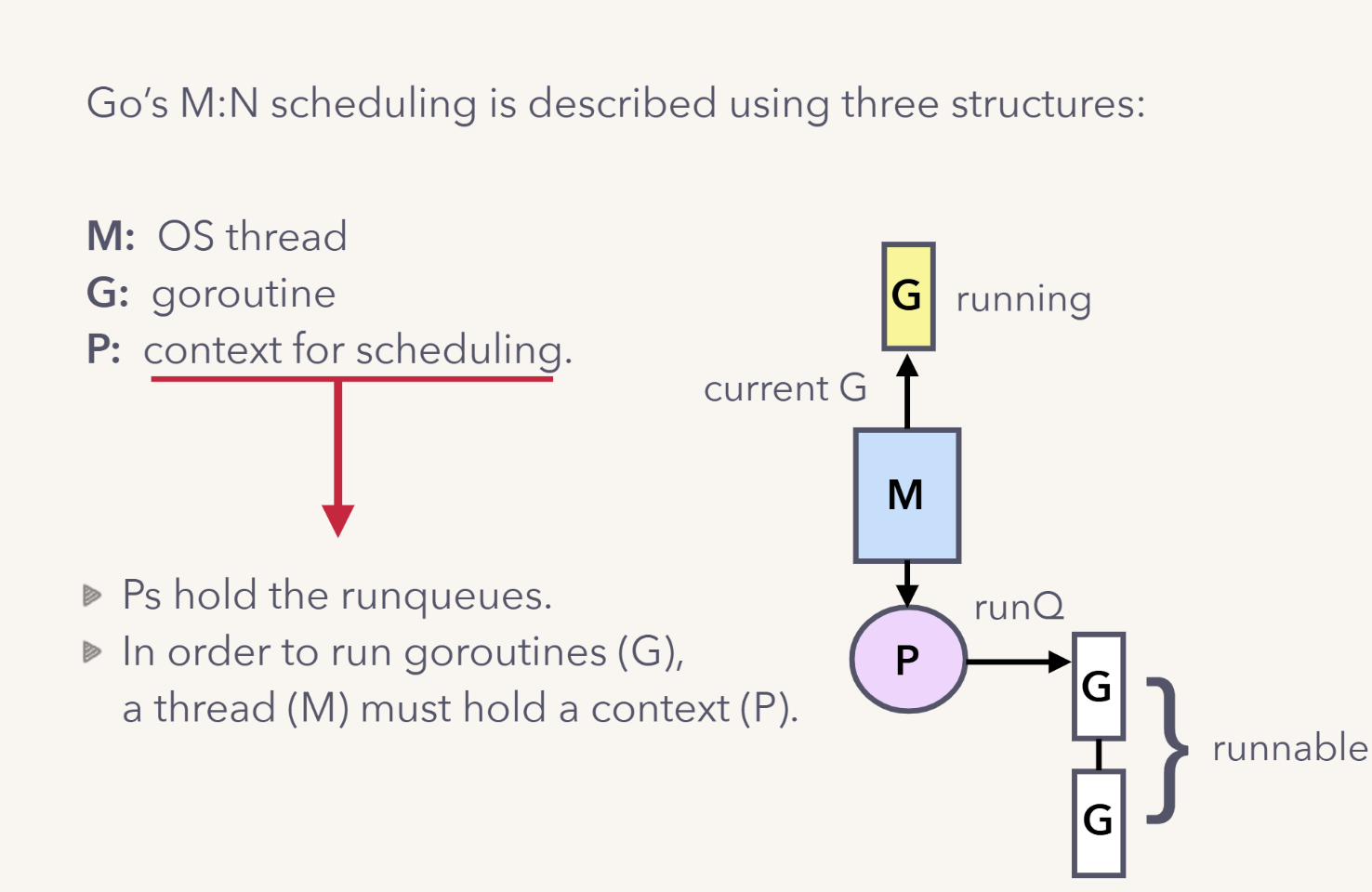
主要通过这种
M:N调度模型将调度权从OS收回,不会让 OS thread 空转(starve),且goutine切换成本很低,以提高并发,详细会在GMP相关的文章展开进行介绍。
sudog #
sudog 是 pseudo-g,代表一个等待的 goroutine 的代理对象。runtime2 源码注释 如下:
// sudog (pseudo-g) represents a g in a wait list, such as for sending/receiving
// on a channel.
//
// sudog is necessary because the g ↔ synchronization object relation
// is many-to-many. A g can be on many wait lists, so there may be
// many sudogs for one g; and many gs may be waiting on the same
// synchronization object, so there may be many sudogs for one object.
//
// sudogs are allocated from a special pool. Use acquireSudog and
// releaseSudog to allocate and free them.
意思是 G 和 同步对象(channel / mutex / semaphore)是多对多的关系,举例解释:
// 一个 G 等待多个channel:
// 同一个 G,同时有 3 个 sudog 分散在 3 个 channel 队列里
select {
case ch1 <- v: // sudog1 挂在 ch1.sendq
case ch2 <- v: // sudog2 挂在 ch2.sendq
case <-ch3: // sudog3 挂在 ch3.recvq
}
// 多个 G 等待同一个 channel:一个同步对象对应多个 sudog
ch1.recvq → sudog(G1) → sudog(G2) → sudog(G3)
sudog 结构体包含 next/prev 指针,可以形成链表结构(waitq 是 sudog 组成的双向链表),通过 sudog 这一层代理实现了上面的举例
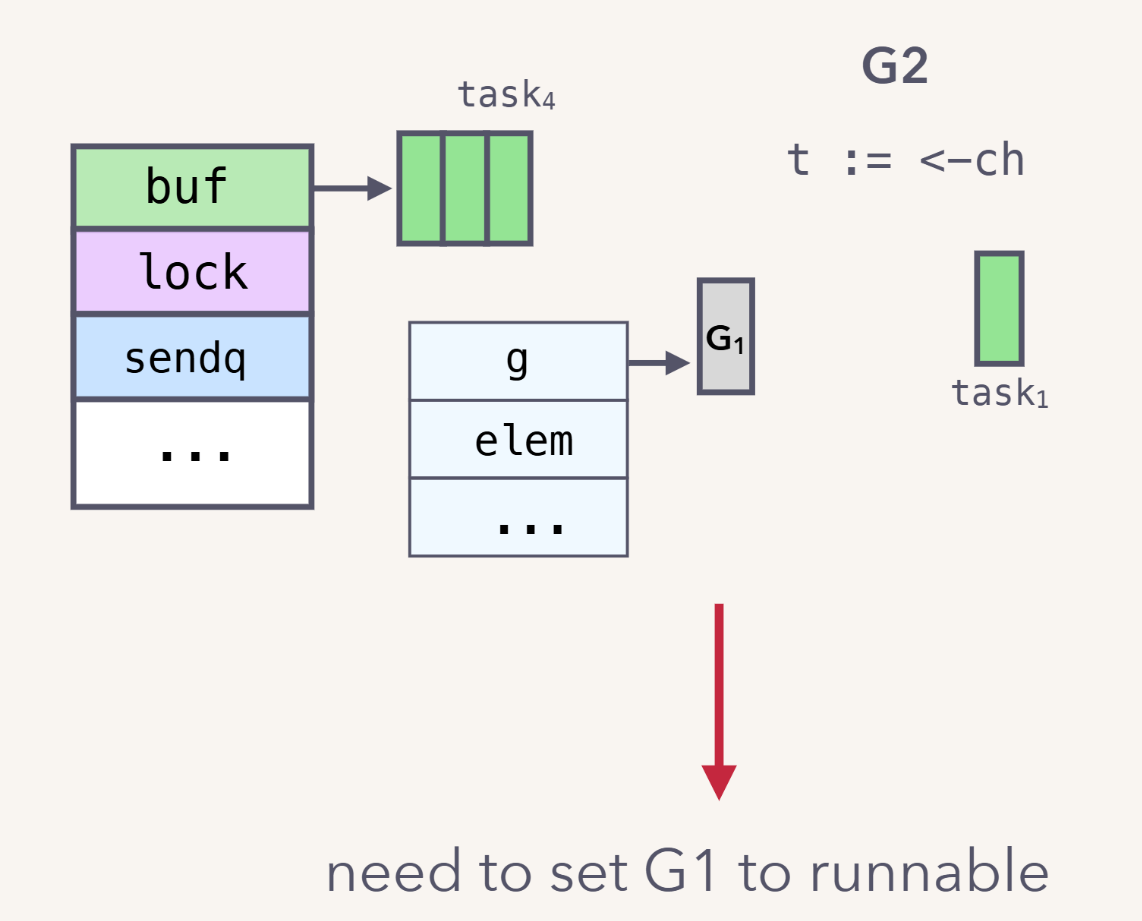
sudog 在下图中的主要作用是:G1 挂起后,task4 还在 G1 的栈上,sudog.elem 指向它,当 receiver 到来时直接从 sudog.elem 读取,不需要 G1 醒来参与,数据就被 channel 取走。同时,receiver 取完数据后,通过 sudog.g 找到 G1,调用 goready(G1) 将其唤醒。
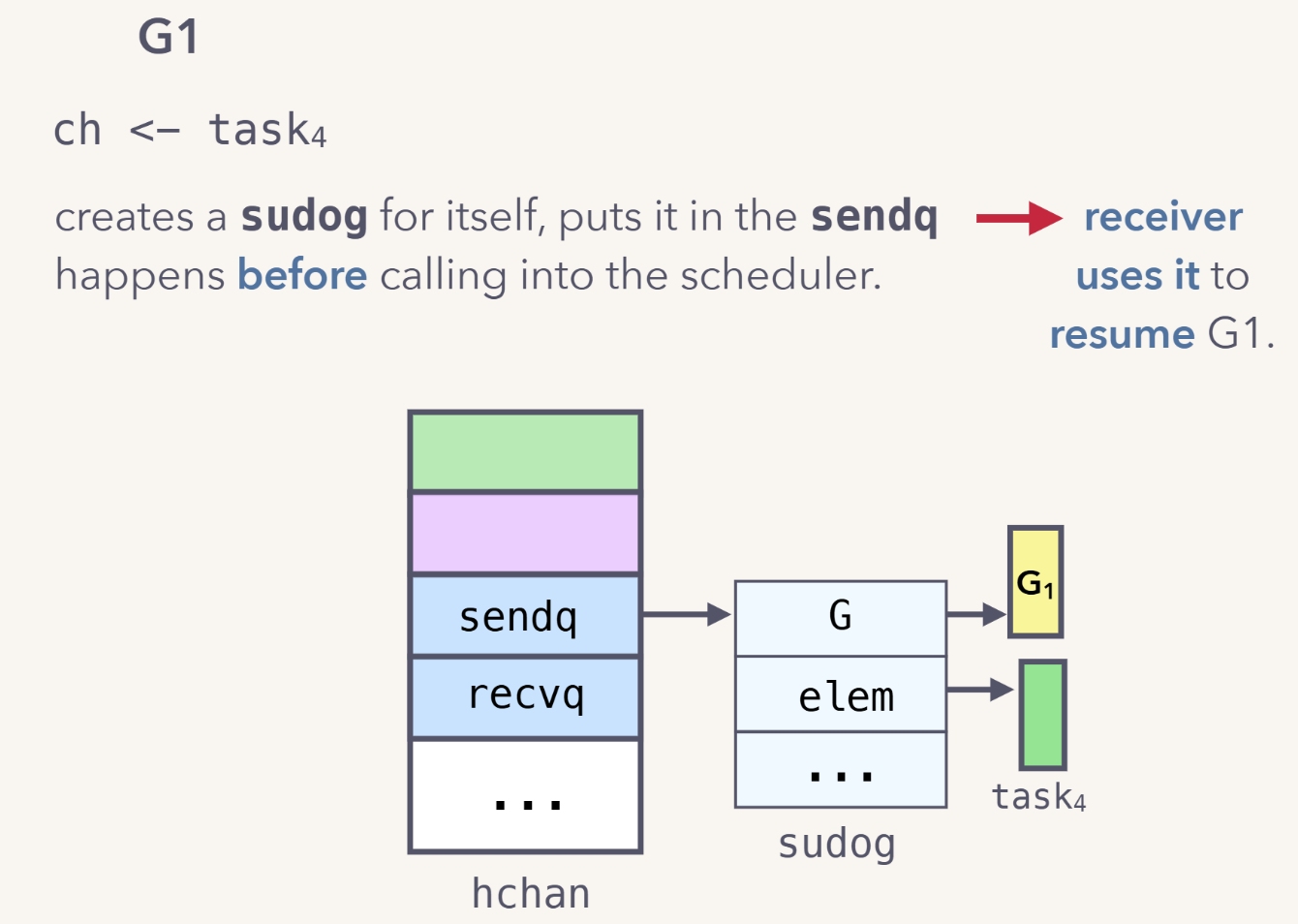
sudog 必须在 gopark 之前入队,否则 G1 睡着了,receiver 找不到它,数据也取不到。
gopark #
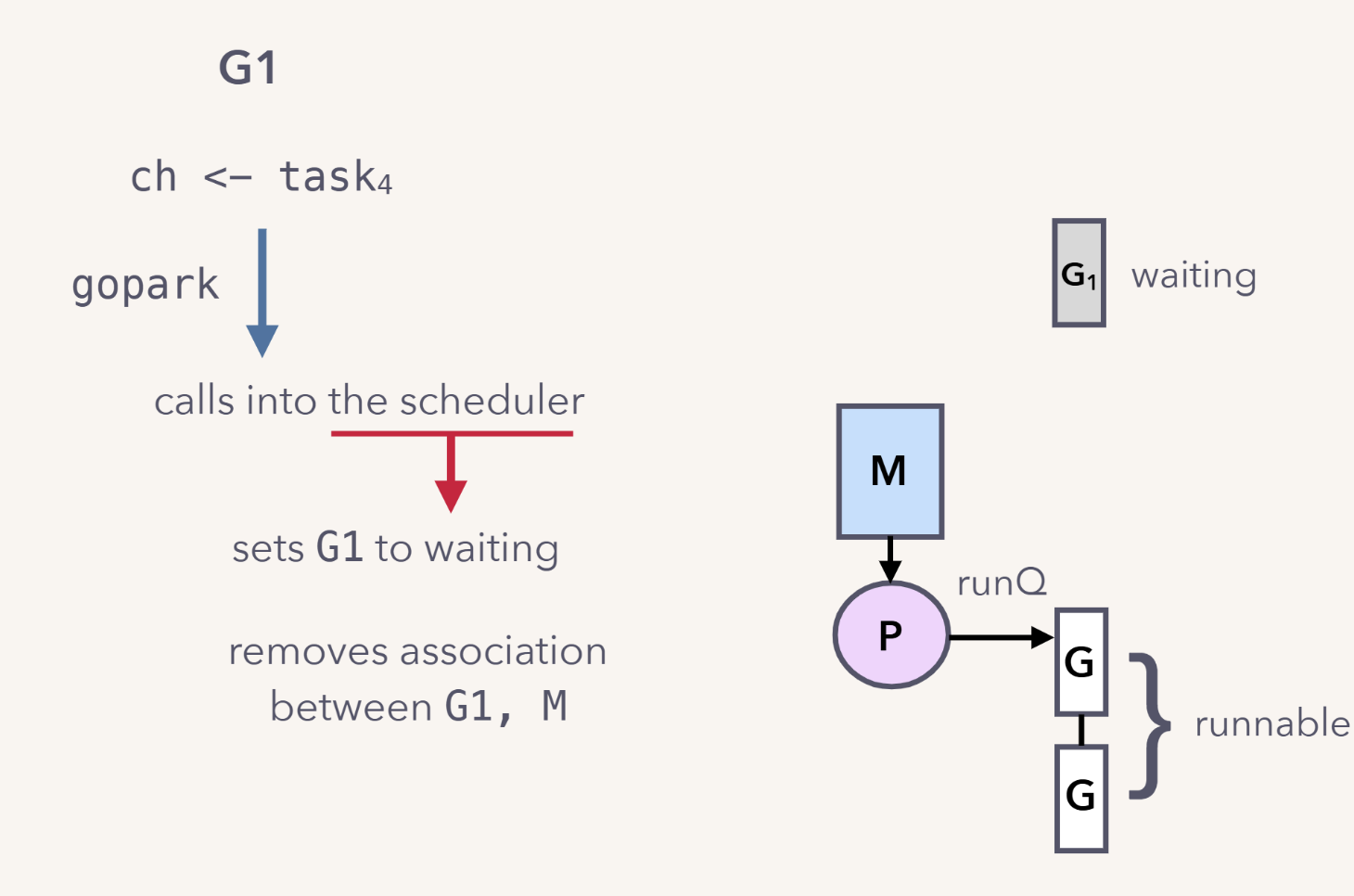
gopark 是 Go runtime 中让当前 goroutine 挂起(阻塞) 的核心函数。
func gopark(unlockf func(*g, unsafe.Pointer) bool, lock unsafe.Pointer,
reason waitReason, traceReason traceBlockReason, traceskip int) {...}
当前正在运行的 goroutine 主动调用 gopark,调用后当前 G 状态从 _Grunning → _Gwaiting,从 M 上摘下,M 可以去执行其他 G。本质是一次主动让权(cooperative yield)。
goready #
当 G2 receive 之后,需要将 G1 唤醒,先通过 sudog.elem 将 task4入 buf,然后 G2 通过调用 goready 唤醒 G1
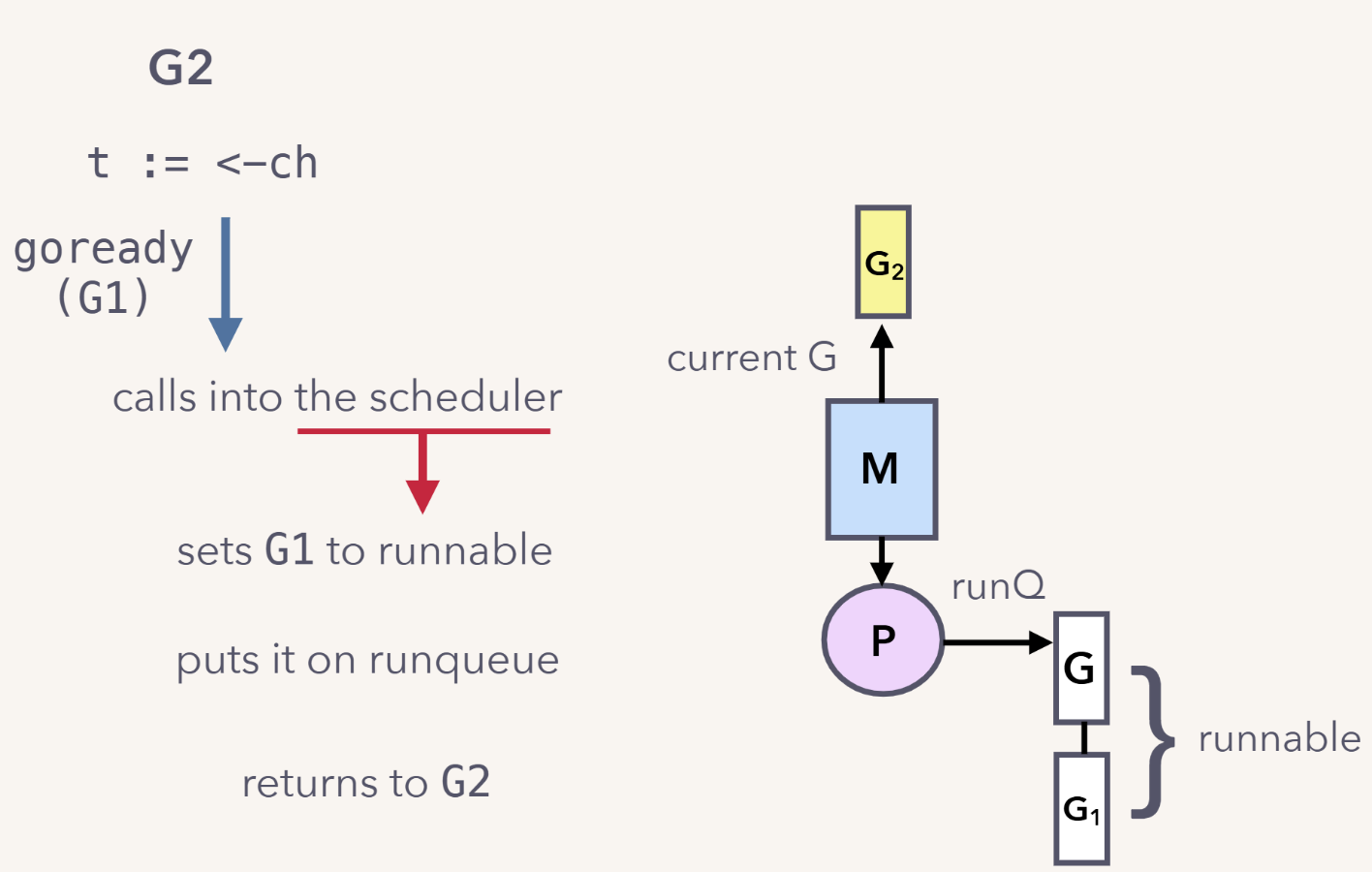
goready 是 Go runtime 中 gopark 的反操作,将一个 _Gwaiting 的 G 标记为 _Grunnable,放入运行队列等待调度。
func goready(gp *g, traceskip int) {
systemstack(func() {
ready(gp, traceskip, true)
})
}
其他情况 #
receive first
#
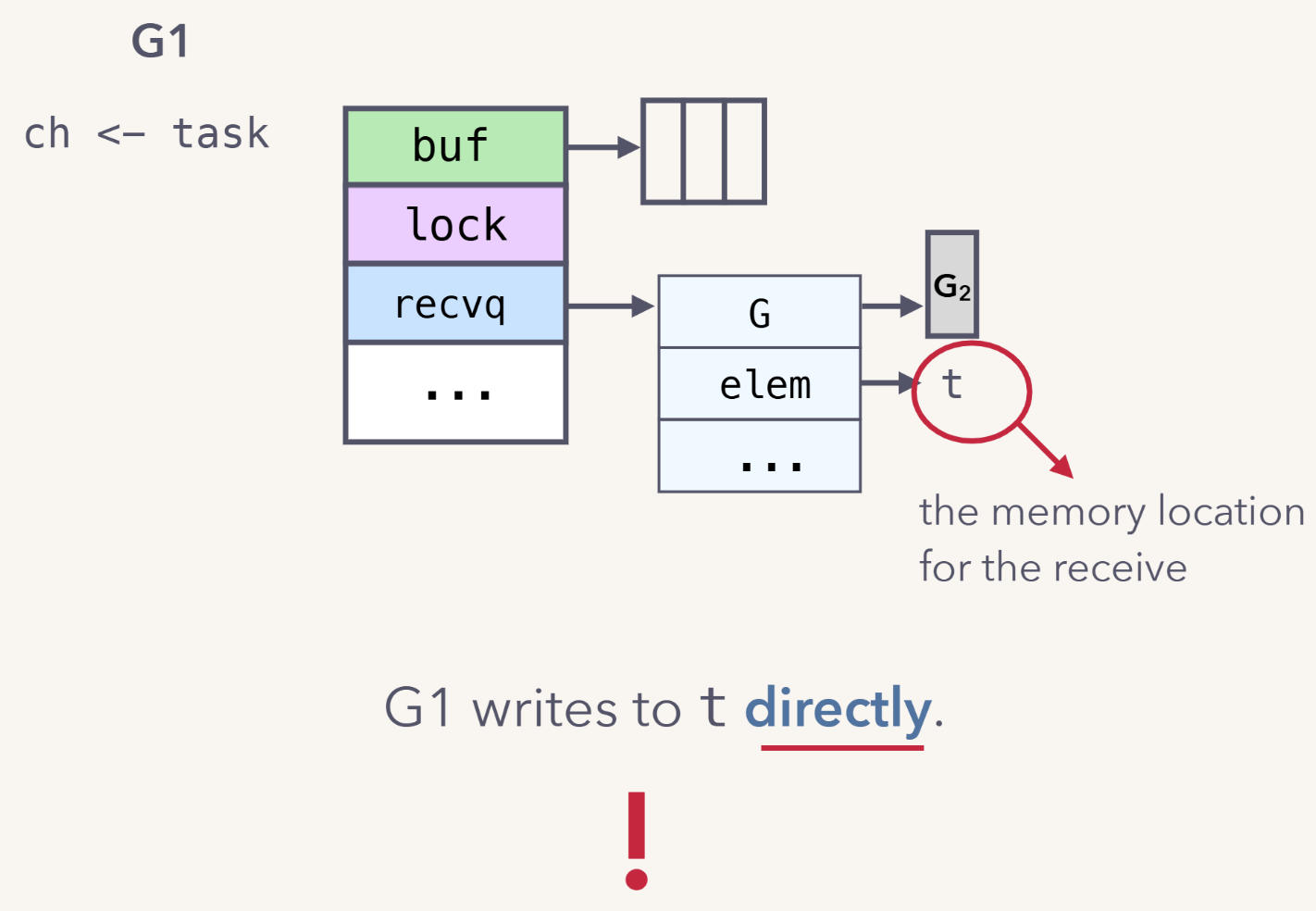
上面是send first的场景,考虑 receive first 即,receive from a empty channel 的场景
G2 执行t := <- ch阻塞,
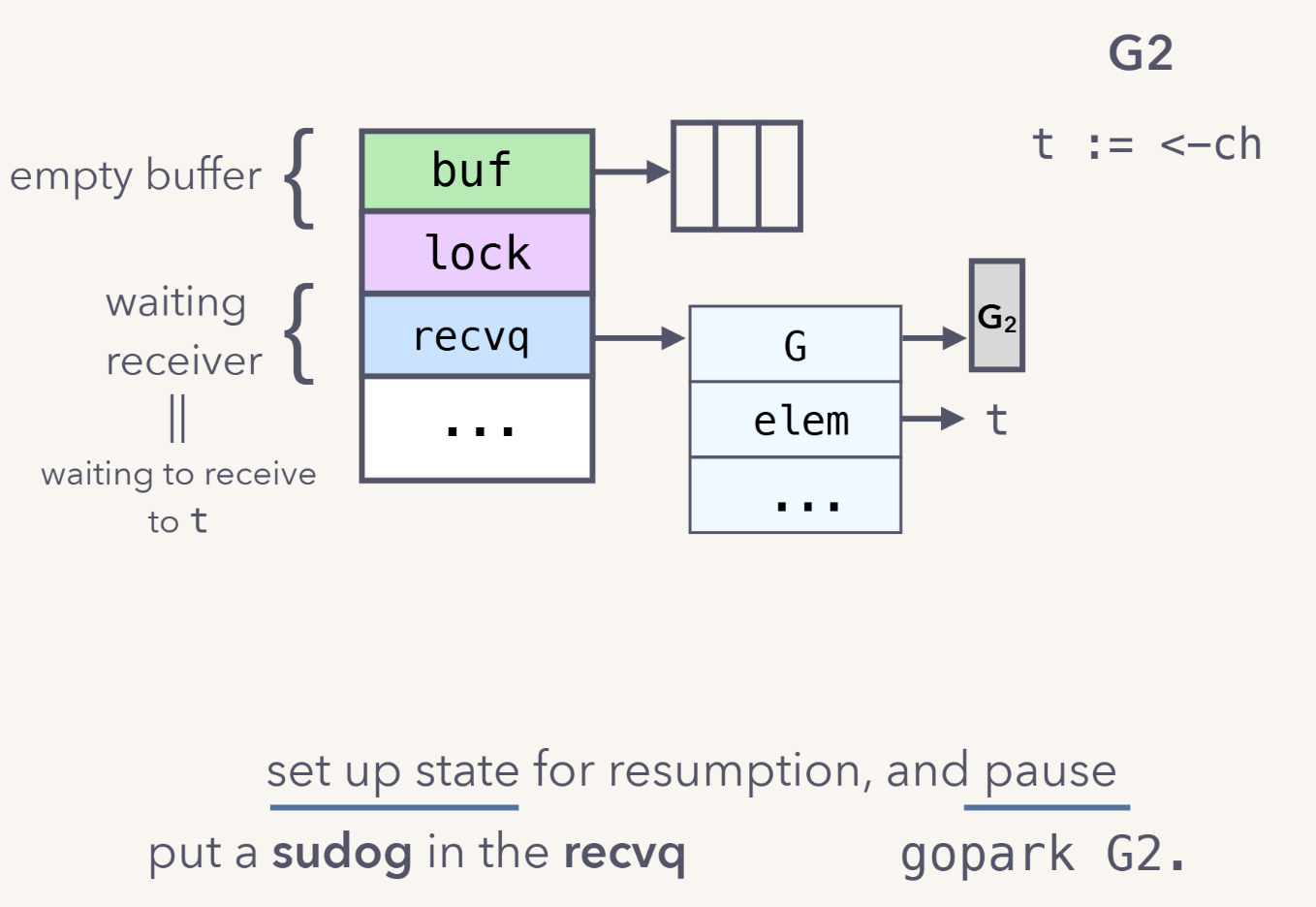
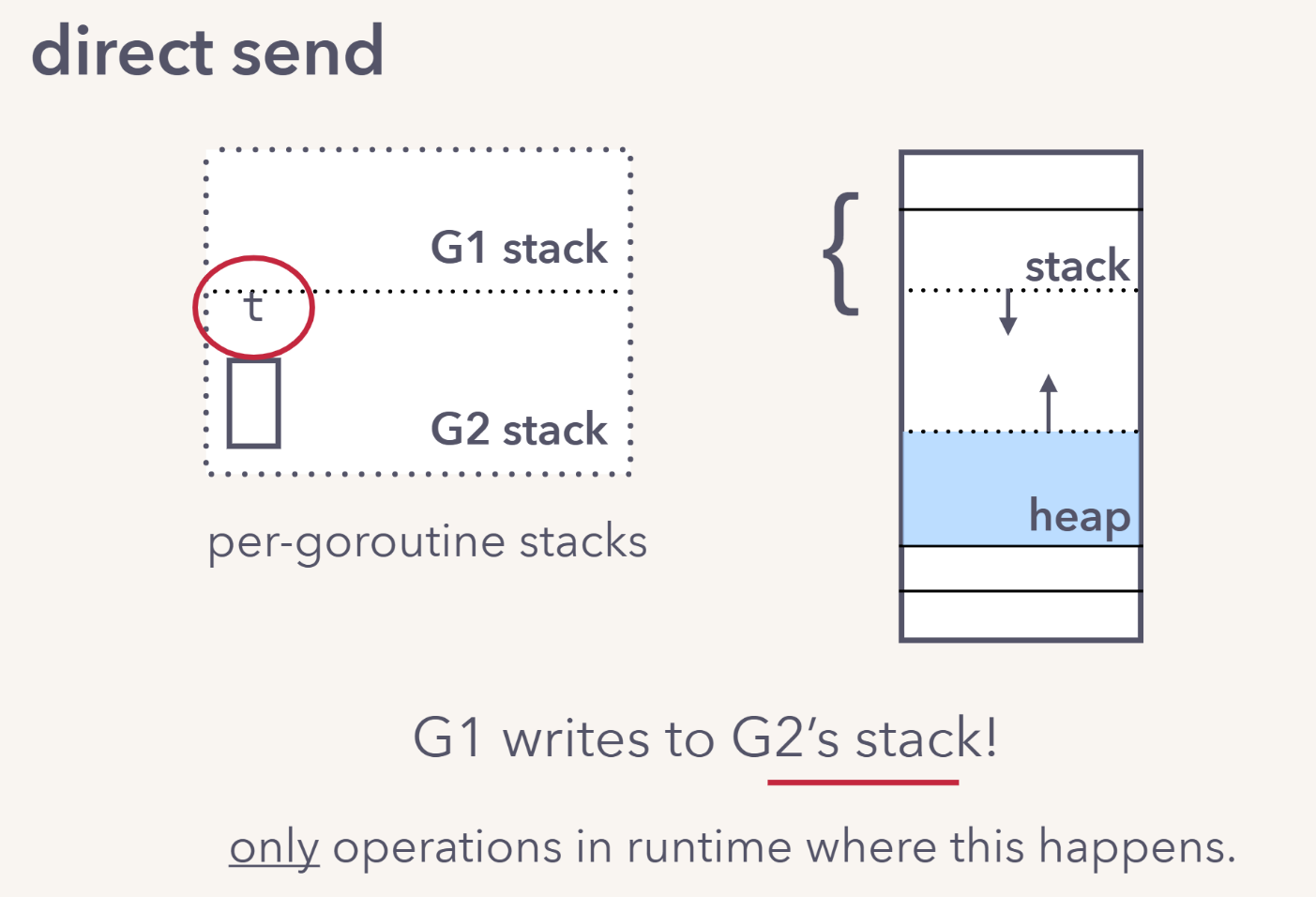
G1 执行ch <- task,G1 通过 sudog.elem 直接写 G2 的栈空间,不使用 channel 的 buf 避免再绕一下,以提升效率
unbuffered channels #
类似上面,不使用 channel 的 buf:
receive first情况:sender直接写receiver栈地址send first情况:receiver直接通过sudog.elem获得数据
select #
select 实现了多路 channel 的等待,哪个 channel 先就绪就走哪个 case,其他的丢弃。当多个 case 同时就绪时,Go runtime 随机选一个,避免饥饿。有 default 时,变为非阻塞等待,所有 channel 都没就绪直接走 default,G 不会挂起:
select {
case ch1 <- v:
case v := <-ch2:
case v := <-ch3:
}
为了保证操作原子性,按固定顺序对所有 channel 加锁(固定顺序防止死锁):
lock(ch1), lock(ch2), lock(ch3)
每个 case 创建一个 sudog,全部挂入对应队列,同一个 G,3 个 sudog:
ch1.sendq → sudog1(G, elem=&v, isSelect=true)
ch2.recvq → sudog2(G, elem=&v, isSelect=true)
ch3.recvq → sudog3(G, elem=&v, isSelect=true)
G.waiting → sudog1 → sudog2 → sudog3 ← G 自己也维护这条链
isSelect=true 标记这个 sudog 是 select 的参与者,目的是告诉唤醒方在操作前必须先做 CAS 竞争,而不是直接唤醒 G。
所有 channel 解锁,G 调用 gopark 挂起,M 去执行其他 G。
某个时刻 ch2 和 ch3 同时来了数据,G2 和 G3 在不同 OS 线程上并行执行,同时尝试唤醒 G1,此时需要通过 CAS 竞争决出唯一赢家。CAS 是 CPU 级别的原子指令(x86 的 CMPXCHG),硬件保证同一时刻只有一个能把 selectDone 从 0 改成 1,从而决出唯一赢家:
G2: ch2 <- v → 从 ch2.recvq 取出 sudog2,发现 isSelect=true
CAS(G1.selectDone, 0→1) 成功 → G2 是赢家,goready(G1)
G3: ch3 <- v → 从 ch3.recvq 取出 sudog3,发现 isSelect=true
CAS(G1.selectDone, 0→1) 失败(已经是 1)→ G3 输了,跳过
CAS 保证即使多个 channel 同时就绪,也只有一个 case 能唤醒 G。
ch2 赢了,G 被唤醒后执行与挂起时镜像对称的清理动作:
sudog2 被取出,完成数据拷贝
lock(ch1), lock(ch3)
从 ch1.sendq 移除 sudog1,从 ch3.recvq 移除 sudog3
unlock(ch1), unlock(ch3)
释放 sudog1, sudog3 回对象池,用于复用,避免频繁 GC
未赢的 sudog 必须从队列中移除,否则 G 已经继续执行,如果 sudog1/sudog3 还挂在 ch1/ch3 的队列里,下次有数据时会再次触发唤醒逻辑,试图唤醒一个已经不在等待的 G,导致错误。
参考 #
https://github.com/gophercon/2017-talks/blob/master/KavyaJoshi-UnderstandingChannels/Kavya%20Joshi%20-%20Understanding%20Channels.pdf
https://www.classcentral.com/course/youtube-gophercon-2017-kavya-joshi-understanding-channels-235585